I spent 5 hours this week working on my project.
After some further deliberation on the points addressed last week, I decided to buy the Arducam splitter from Amazon. I was really frustrated with the complexity and lack of functionality of the ClusterHAT setup and I wanted to explore my other option.
While waiting for the splitter to arrive, I downloaded the most recent version of Raspbian Jessie, and installed it on the Pi 3. I was thrilled to discover that the splitter is very easy to use and works perfectly. All the camera issues I was having last week were resolved by using the splitter instead of the ClusterHAT. The sample code cycles through each camera and tells them to individually take a picture. As a result, each camera’s photo differs by about 3 seconds. This may result in duplicated people when I shoot in public, but I’m hoping it won’t be a major issue.
The splitter works by enabling and disabling each camera one by one, making the cameras exclusive – no two cameras can be working simultaneously. With this configuration, I no longer think I’ll be able to shoot 360 video. Fortunately, that was a stretch goal, so I’m not upset about it.
My initial camera test (stitched by Hugin) revealed that I might not have enough cameras.

The photos nearly align but there doesn’t seem to be sufficient overlap between them for smooth stitching. A corner of the room and 3’ of space to the right of my desk are missing. When I examine the individual photos, there seems to be sufficient overlap. The photos side by side show the areas that got chopped.

It’s possible that local light/exposure variations make the overlaps too different for Hugin to recognize. I spent some time testing different parameters within Hugin. None of them seemed to make a significant difference in retrieving the lost sections of the room. I’ll need to do more testing (outdoors) to better understand the validity of my current camera configuration. This will likely involve a similar button configuration that I used for initial tests months ago as well as my angle tester.
I did another test indoors which revealed a gap between the cameras, most visible around my partial roommate.

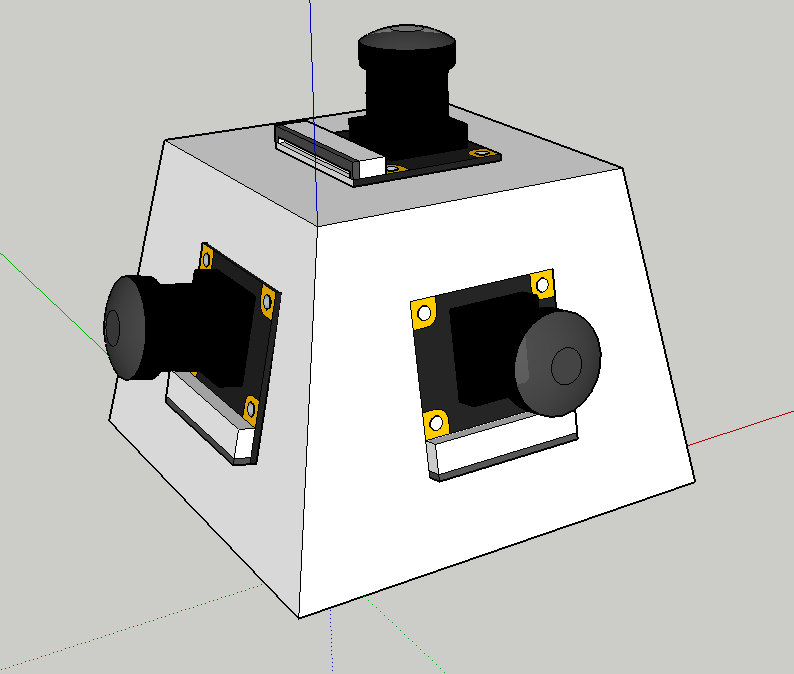
I’m now fairly certain that I will need a 5th camera. Fortunately, the splitter model is stackable and expandable, unlike the ClusterHAT configuration. The next model of the camera mount will likely be square. Throughout all of these tests, it was difficult to get the upward facing camera’s photo to be included in the final rendering. My best guess is that there isn’t sufficient overlap for it to fit. The cameras seem to have a 120 degree viewing angle in the vertical direction, as opposed to their theoretical viewing angle of 160 in the horizontal direction. I’m going to spend some time this week using my angle tester and getting a better sense of the actual viewing angle of these cameras, and then create a revised camera mount. This next version may have angled walls, as shown in the rough mock up below.