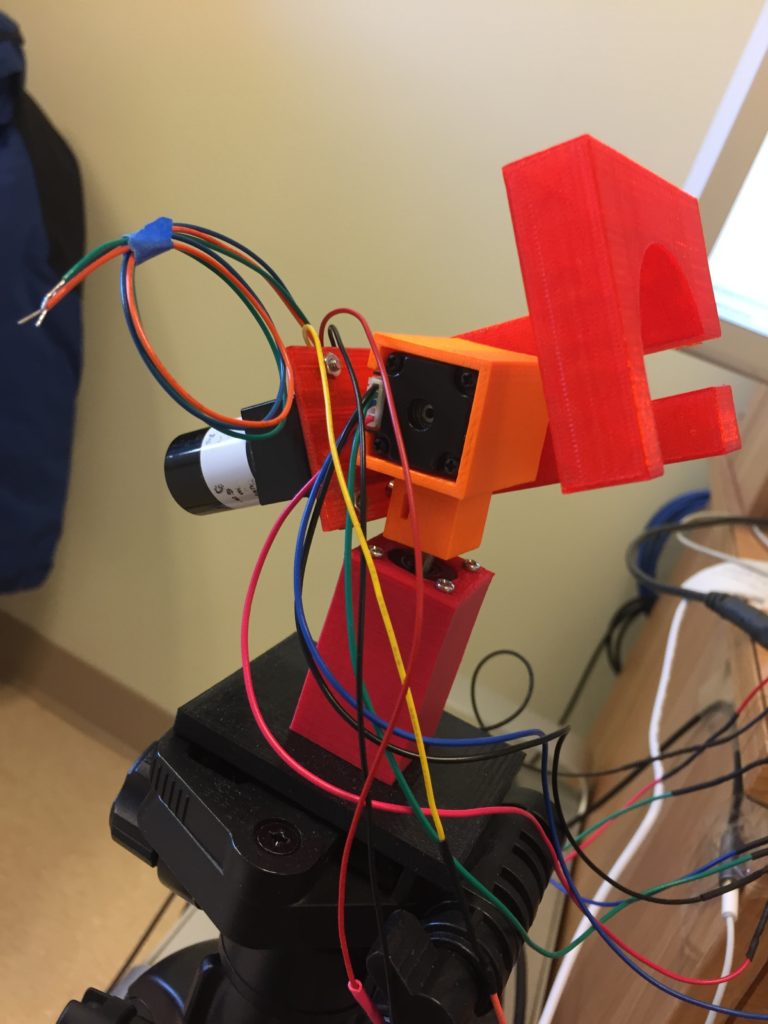
I’ve been prototyping a LIDAR scanning system. This project is targeted at room scanning – quickly creating high fidelity point clouds of a space. It consists of 2 motors mounted perpendicular to each other, such that one sweeps through the Azimuth (Azi) and the other sweeps through Altitude (Alti). A Garmin LiDAR Lite v3 is mounted on the Altitude motor. All hardware interfaces with an Arduino via an Arduino shield specifically designed for this project. The mounts for each component were modeled in Solidworks and then 3D printed.
Here is a brief animation of the system in action.
If you are interested in reading about this project’s technical development, I encourage you to check out my posts here. The posts are in chronological order with the most recent information at the top, so it may make more sense to scroll down and read up.
Some photos, renderings, and additional information can be found below. When the project is complete, I’ll publish a detailed how-to guide, just like I did for my 360 Camera Project.
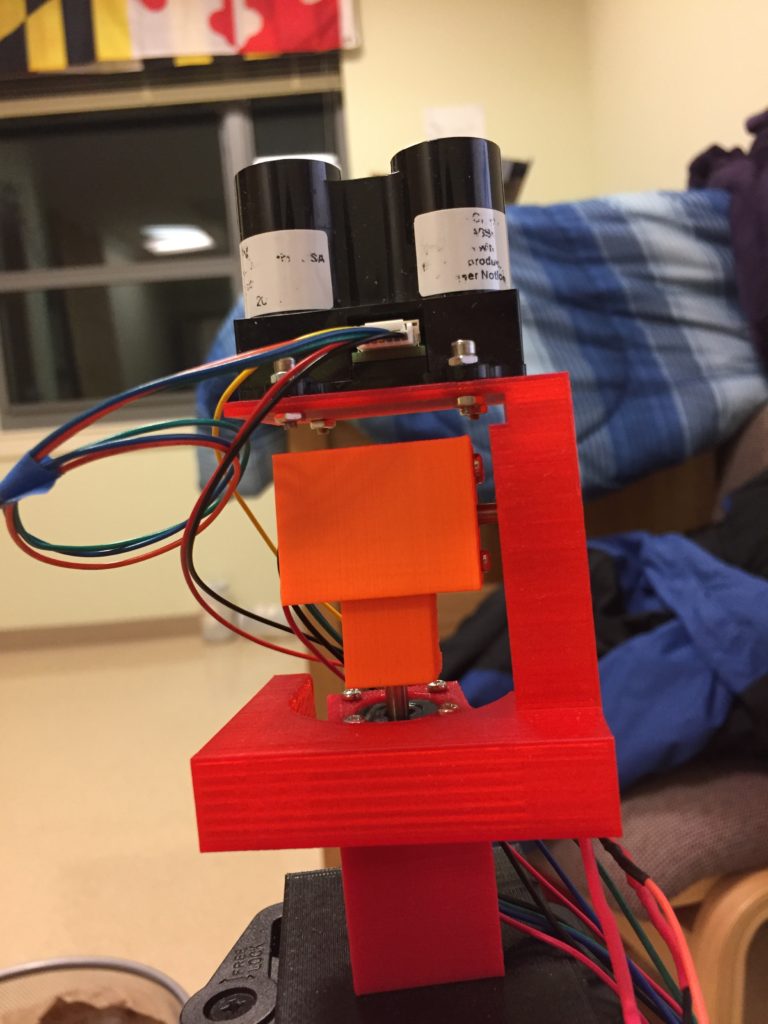
For visual clarity, each part has been given a unique color in these renderings, but note that these colors do not match the colors the parts were printed in.
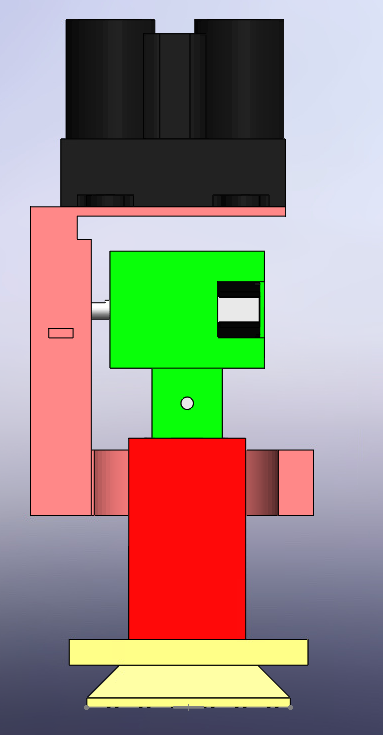
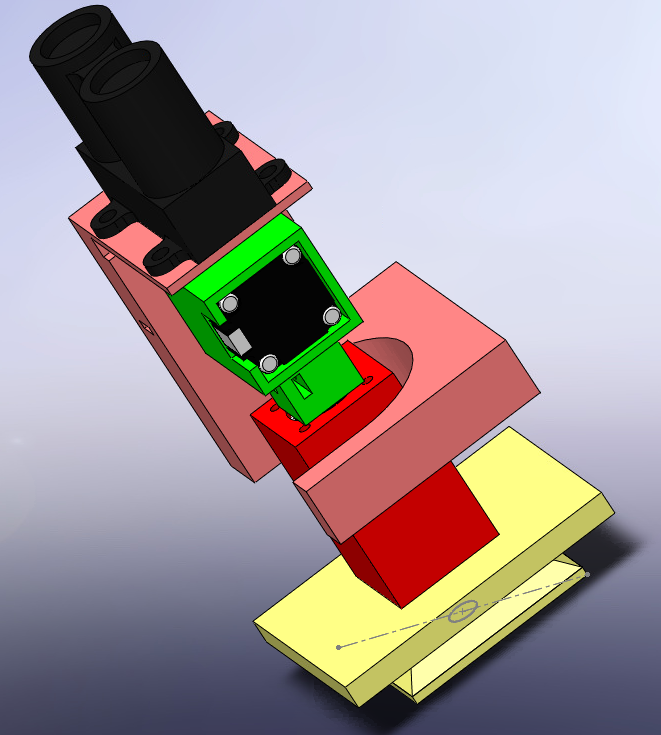
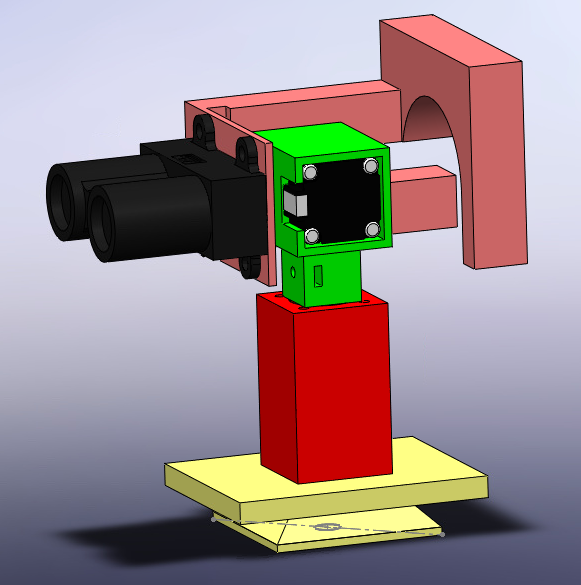
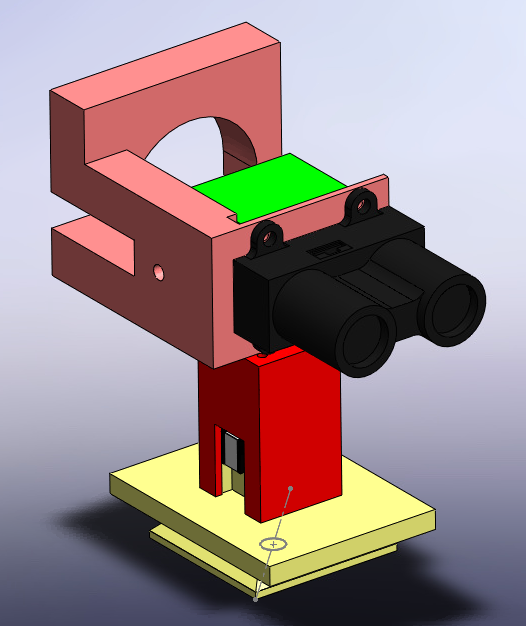
The Altitude motor housing is shown in red. The Alti motor housing is in green. The yellow component is a modified tripod plate that forms a stable platform for the system to run off of.
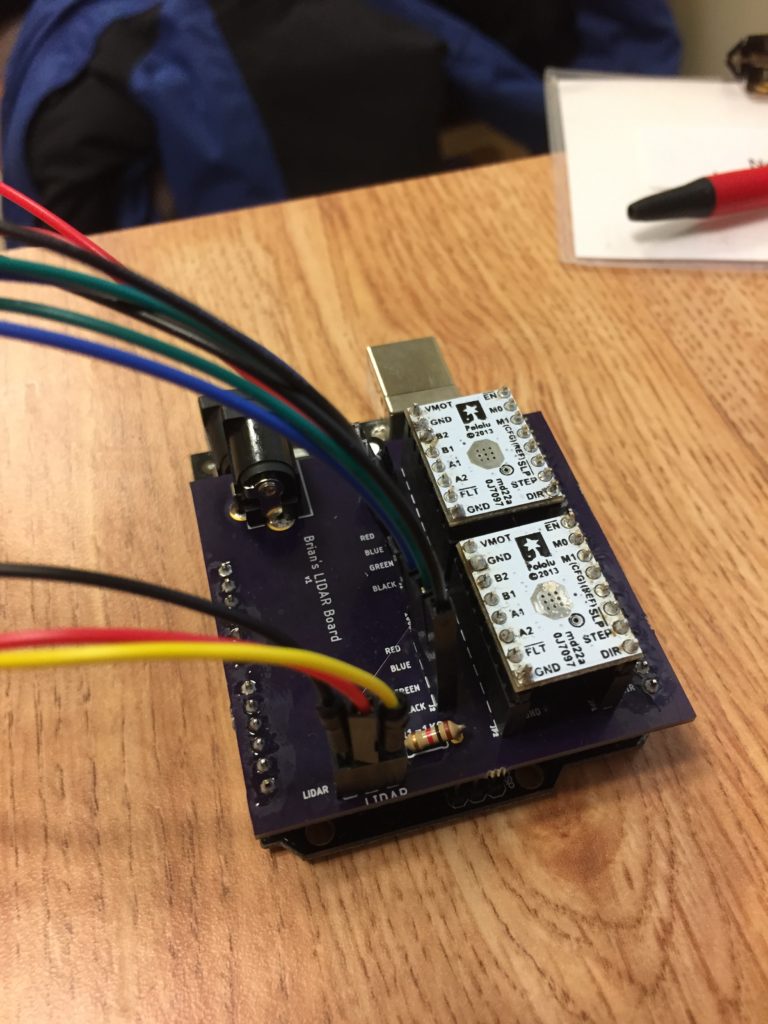
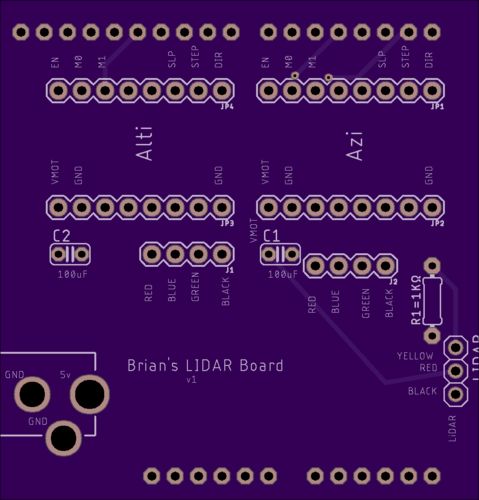
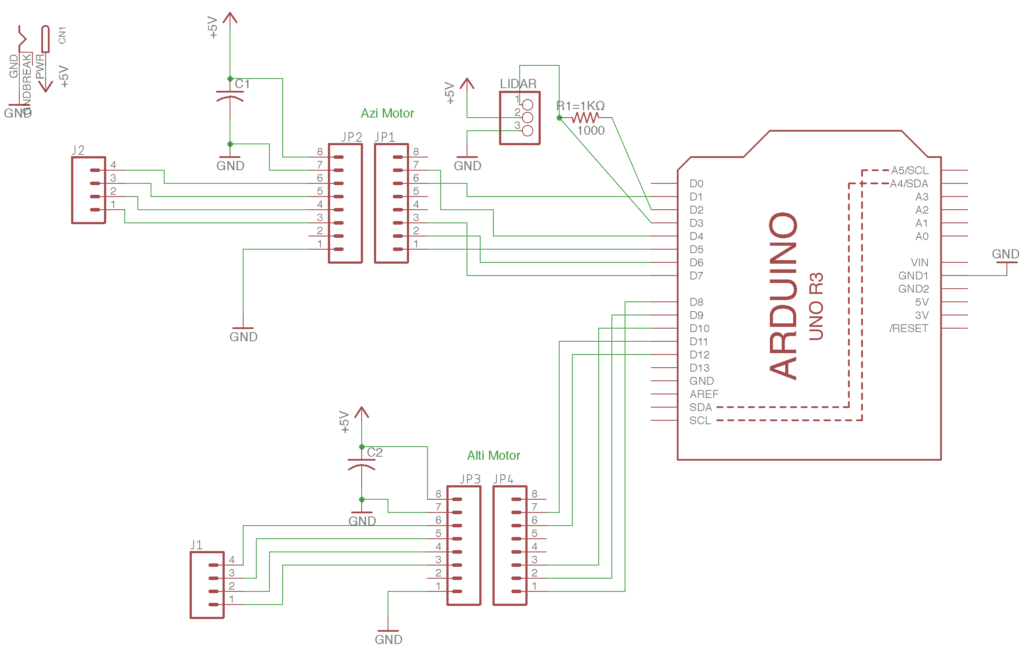
Below is the Arduino shield, which drastically reduced the wire clutter of this project.