I spent roughly 5 hours this week working on this project.
I connected a button to the Pi and configured it so that I can trigger all four cameras with it.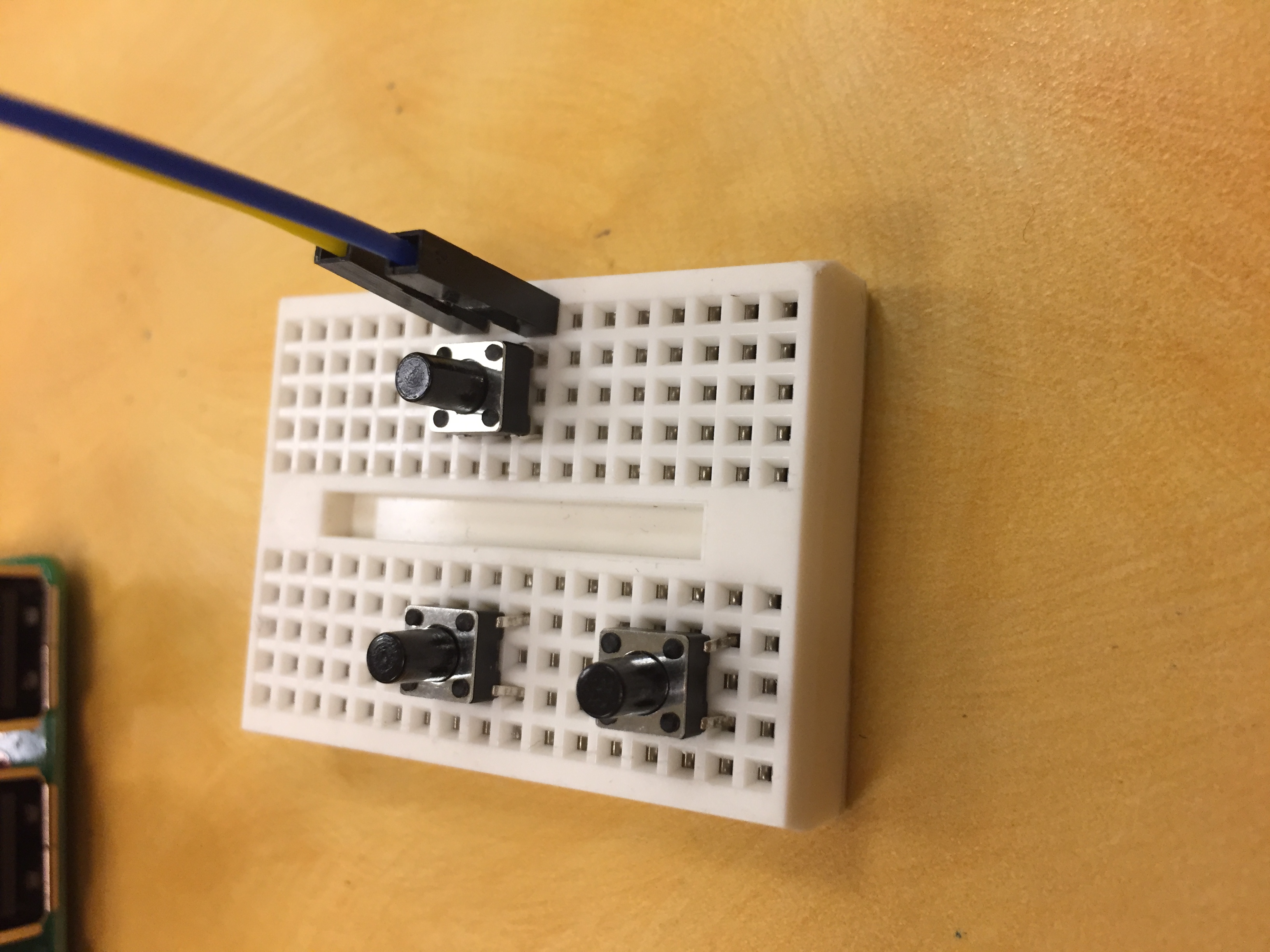
This took some experimenting as the wires and multiplexer used different GPIO pins and pin naming conventions, which were mutually exclusive. By default, the sample code from Arducam saves four pictures, ‘capture_1.jpg’, _2, _3, _4 to the current directory. If there are already files there with the same name, it will overwrite them. This isn’t very useful for repeated real world tests. I’ve been trying to append the timestamp to the filename to avoid this issue, but have not yet had success.
I need to test this in a bigger environment than my room to check the alignment of the cameras. As each camera takes its photo individually (not synchronously), there is a small delay (~3 seconds) between each photo. When I hold the system, the inevitable shaking of my hand over this time may be the factor that misaligns the photos. I therefore needed a way to test this with stability. I modified my existing camera mount to include a arm that extends away from the body. This should allow me to mount it to my tripod without worrying about the cables getting in the way. I created a hexagonal cutout on the underside. In this I’ll fit a ¼”-20 hex nut. This nut matches the treading on my tripod camera screw. There is a second notch for the locking pin.
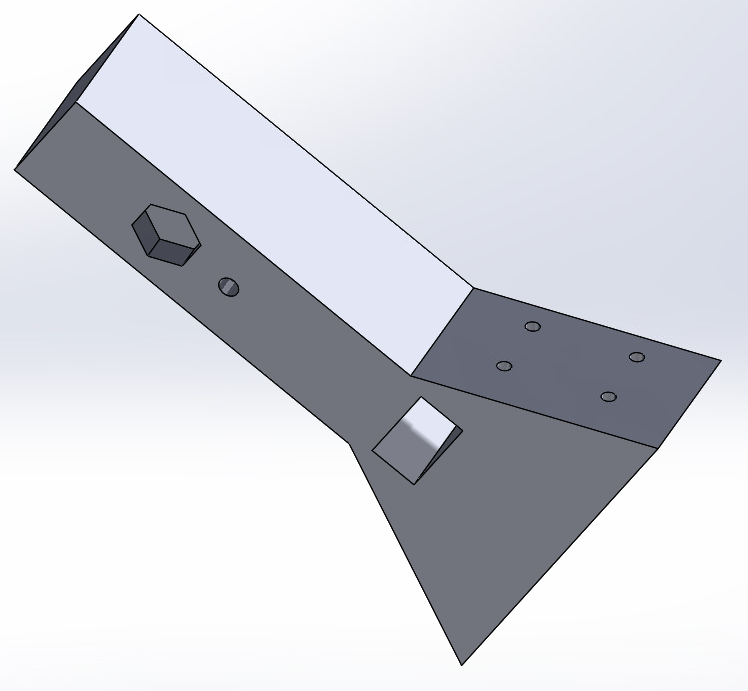

Once I get this printed, I’ll need to attach new screw inserts and then mount all the cameras. As soon as that is done, I can take it outside for some tests. The Pi will have to be powered by a battery. The results of this test will determine how I proceed from here. If I can’t stitch all 4 photos together without issue, I will need to redesign this mount again, and likely add an additional camera, which will require an additional multiplexer. The design of the Pi case will be determined by the number of multiplexers and cameras I need.
Due to the limited availability of the 3D printer in the DCC lab, I’ve outsourced this revision to Terrapin Works.
In addition to the outdoors tests this week, I will try to start working on the homography transformations and other software aspects of this project.
I’m worried that the increased testing and recent design revisions may put me behind schedule, especially if I need to wait a few days for the next multiplexer to arrive. I’ve outlined a (hopefully) realistic rough schedule for this coming week.
Monday – Recieve camera mount v3 from Terrapin Works, assemble existing cameras on to it
Tuesday – Finalize button functionality and non-destructive photo naming (in class). Begin working on software
Wednesday – Test outside. Use Hugin to stitch photos. If an additional camera is needed, order multiplexer from Amazon.
Thursday – Modify camera mount and print.
Friday – If camera mount was printed in the DCC lab it should be ready. Install the screw inserts and mount the cameras. If the camera mount is printed at Terrapin Works, it might not be available until Monday.
Saturday – I expect the multiplexer to arrive on Saturday. Attach 2nd multiplexer and 5th camera to Pi. Modify existing program to utilize 5th camera
Assuming this schedule plays out as outlined above, I’ll have another prototype ready or near ready by next Saturday which will be followed by another round of testing and revisions.