I excerpted a section of my original timeline here.
March 1-10
(If Necessary) Modify camera holder; reprint, rebuild, retest.
Continue working on homography matrix and transformations
Finalize web interface
Print MasterPi case. Revise design as necessary
Begin working on system enclosure
March 11-19
(If Necessary) Modify MasterPi case; reprint, rebuild, retest.
Continue working on homography matrix and transformations
Write program that to handle all required steps on MasterPi
March 19-26 – Spring Break
March 27-April 10
Finalize automated homography transformations
Finalize MasterPi program
Modify any 3D printed cases, as necessary
Assemble full system
Iron out any issues
April 11-20
Real world testing
April 21-30
Real world testing – time-lapse
May 1-10
Real world use – time-lapse
Port videos to Google Cardboard
Prepare for Capstone fair
My design revisions, multiple prototypes, and general busyness have caused some deviations from this schedule. I am still iterating through prototypes for the camera holder and Pi case, and only very recently began exploring the photo transformations that I need to do. Due to the malfunction last week and subsequent inclement weather, I haven’t had a chance to test the system outside to verify the camera alignment. I also haven’t yet modified my Dashboard for remote control. However, this should, in its simplest form, easily follow the creation of the time-lapse program on the Pi. I intentionally did not schedule any time during spring break when making this timeline, but I’ll have to make use of this week to get back on track.
I started reading extensively this week through Hugin’s documentation. They have information on scripting and running the components through command line. Their section on simple scripting discusses the possibility of building and reusing a template. I think this will probably be my best course of action. I should be able to build a “perfect” template on my computer and then give it to the Pi. Even if I can’t get the hugin components to run smoothly on the Pi, I should be able to use Hugin’s batch processor on my computer to handle everything.
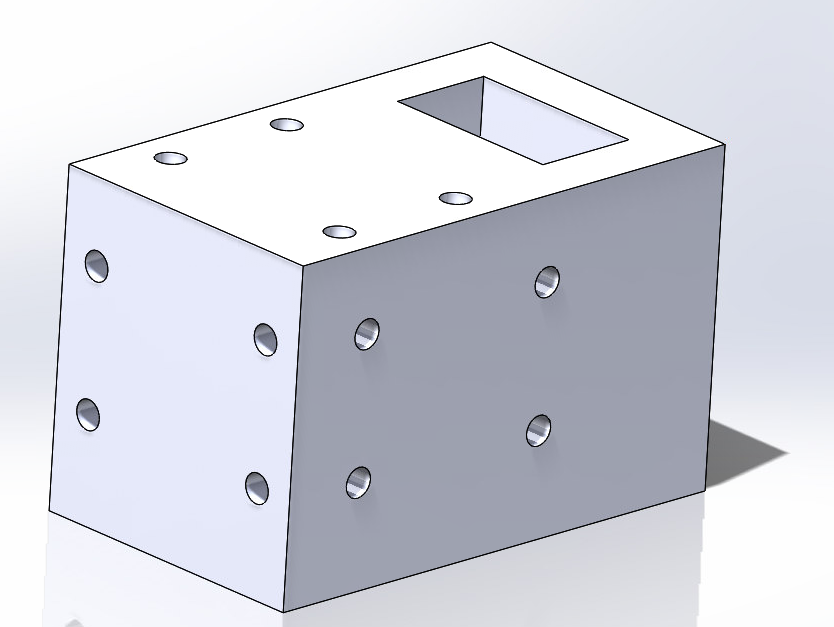
I spent some time this week designing a rectangular camera mount. If I need a 5th camera, I’ll use this configuration. This setup should easily produce cubemap images which shouldn’t be difficult to combine, event without Hugin.
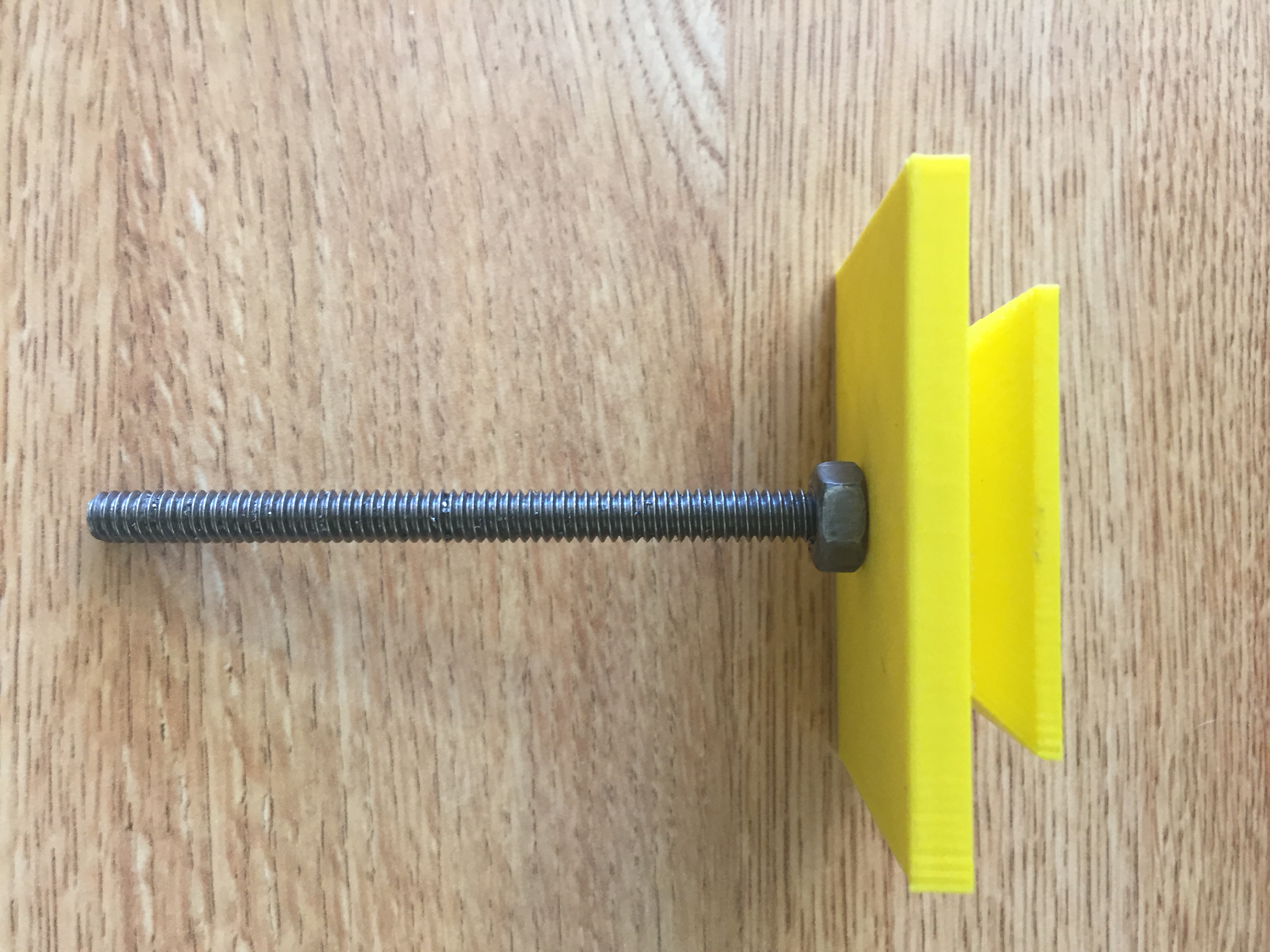
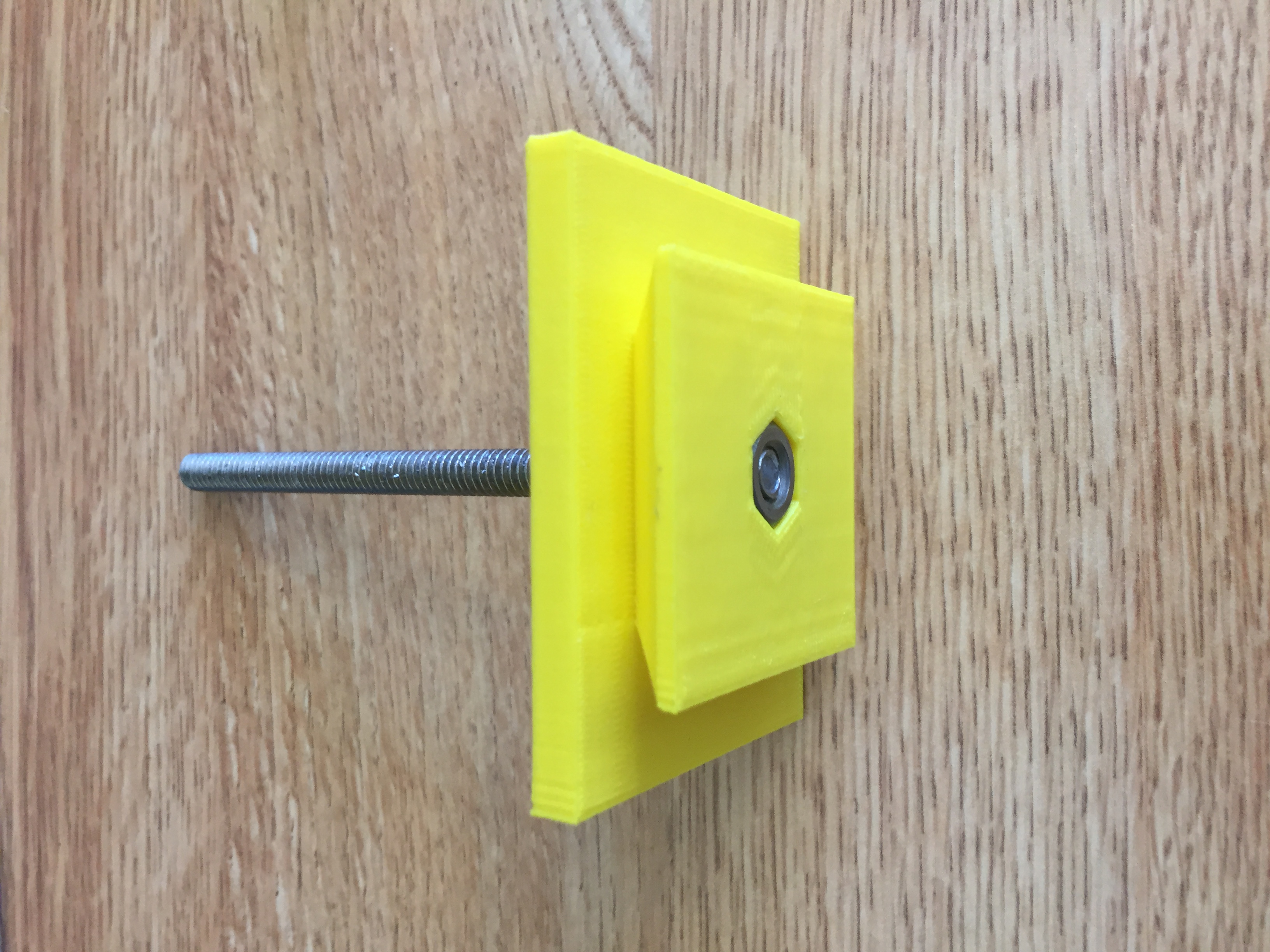
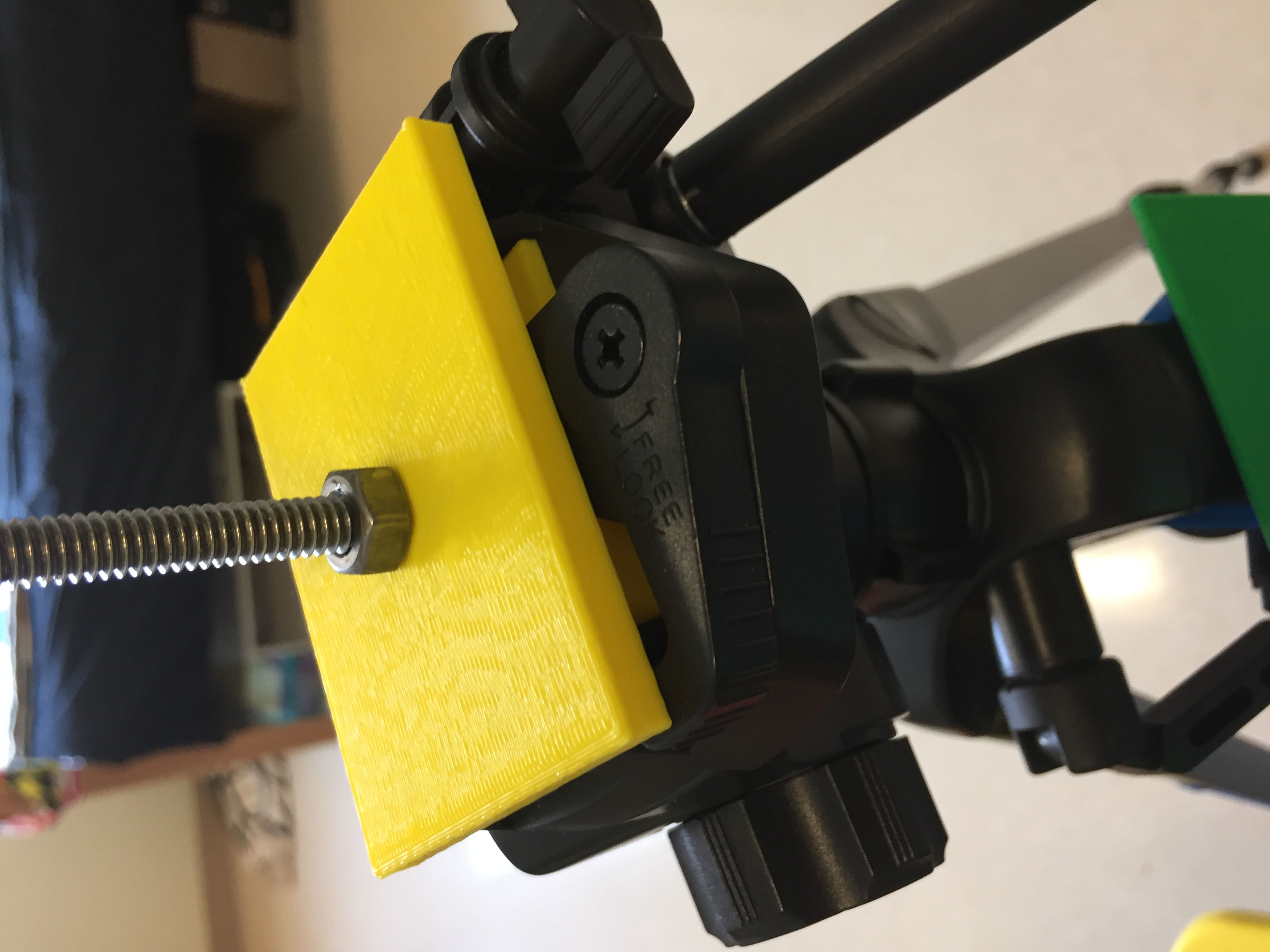
Fed up with the malfunction of tripod mount I made last week, I created a custom tripod plate with a hex nut cutout. This exactly matches the dimensions of the plate my tripod shipped with, but allows me to directly and securely mount my threaded rod. I’m very pleased with how well this print came out on the first try. For anyone who wants to attempt a project similar to this one, buy yourself a set of nice digital calipers. This would have been impossible with a simple ruler.
{kind=link}
I had originally envisioned being able to control all program parameters remotely through my Dashboard interface. I’m no longer convinced this is entirely necessary. Most simply, I need to be able to launch the system. This can (and probably will) include default parameters for interval between photos, duration (until stopped), and photoshoot name (Date). If these are hard coded as defaults, I don’t need the Dashboard to launch the system – it could be launched with the simple press of a button. I might wire two buttons into the Pi – one to start it and one to stop everything and shut it down. The Dashboard becomes useful for status updates as the camera is running. I’d like to know how many photos it has taken and if it’s encountered any errors. I don’t know yet what would be involved in pushing these updates to my Dashboard interface or if I can program this within the time constraints of the remainder of this semester. As long as the Pi is connected to wifi (which it would need to be anyway for the Dashboard), I can VNC into it. If my system has verbose output, I’ll be able to check in on it. I don’t know what effects this usage will have on power consumption, and therefore battery life, so I’ll use it sparingly until I know more. I might invest in something like Adafruit’s ChargerDoctor to monitor battery use.
This coming week I’m going to test the cameras and work on the transformations required.