As I mentioned previously, the motors get really hot when running at their new speeds. In an attempt to correct this, I made some modifications to the housings for each motor to give them more room to breathe.
![]()
![]()
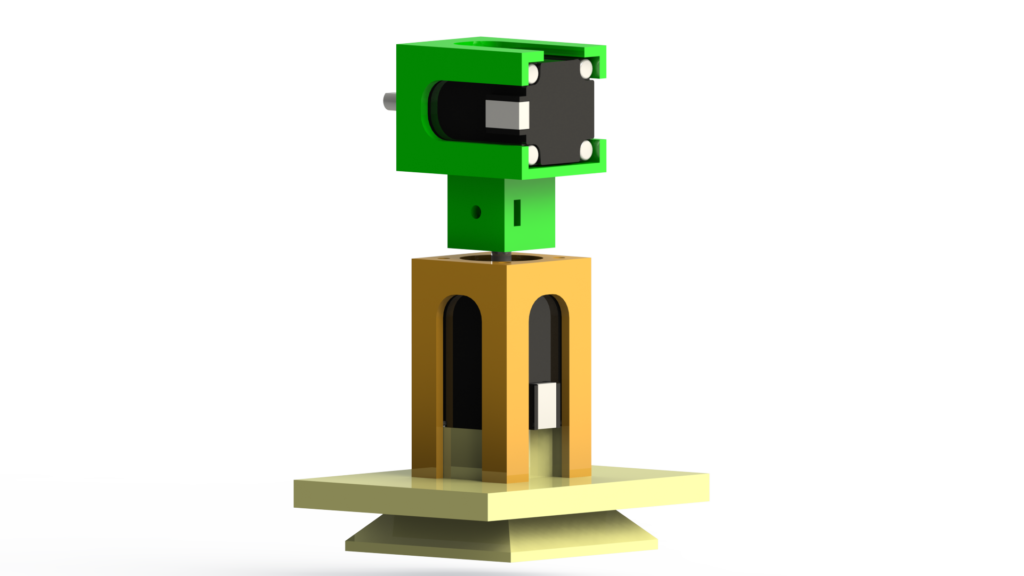
I don’t think either motor experiences much in the way of external forces, so the reduced walls shouldn’t pose a problem structurally. These new designs should be much less insulative and hopefully the motors to self cool more effectively. When making these revisions, I took some time to clean up the CAD files and tidy up some remnants left from earlier revisions. I also shortened the motor shaft hole on the Alti housing so that it won’t slide down and get stuck on the screws, as it had previously. I’m going to get the new housings printed and then we’ll see how they hold up. I’ve included some quick renders of the new system:
![]()
![]()
I went back and added fillets to the tops of each cutout.
![]()
I made a short Processing code to collect the data from the Arduino, do the coordinate math, and save the coordinates (X,Y,Z) as a CSV. This should be a lot more reliable and easier to use than the copy/paste & spreadsheet method I used before.