I’m revisiting the idea of cameras on a rotating platform because I now think a static camera setup will require a prohibitive number of cameras.
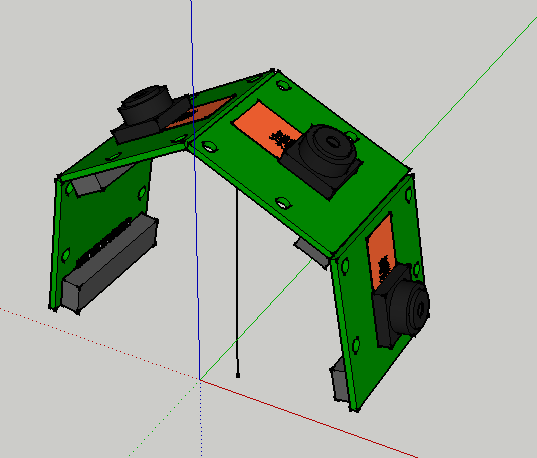
I started in Sketchup, with a model of the Raspberry Pi camera that I found online. I duplicated the camera and tilted it 54°, and then aligned them tip to tip. I repeated this until I had 4 cameras to cover ~216° of view.
I rotated a copy of this camera arch 45° (a nice multiple of 360° that provides amble overlap) 4 times to create a superposition of the cameras in each position that would be required.
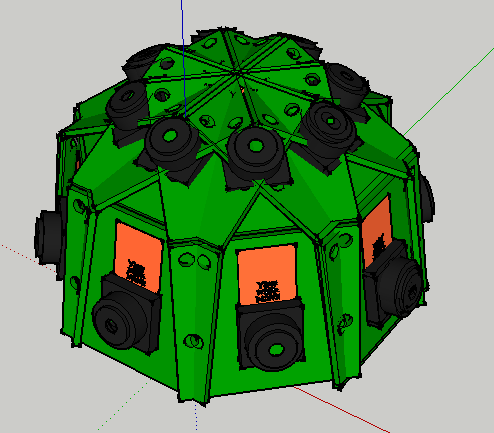
Now, if this were a static setup, that would be 16 cameras required. While I could probably knock out one or two cameras with some clever geometry, this simple polyhedron gives a good estimate of how many cameras would be needed for full coverage. ($15/camera*16) + ($53/multiplexer*4) = $452. That many cameras, in addition to being a huge hassle to handle, will push this project over $500. With a rotating camera system, I’d only need 4 cameras, 1 multiplexer, and a servo, for an estimated cost of approximately $130, which is much more reasonable. I initially wanted to avoid motorized cameras for several reasons. Moving parts are more likely to get stuck or jammed, and it movement adds an additional point of failure. If I shoot a time-lapse in a crowded area, I’m likely to catch people in multiple positions in the same equirectangular frame, which, in addition to looking strange, might pose difficulties for the stitching software. Having a motorized component also adds to the power requirements of this system. On the bright side, I could probably control the servo with the Pi, reducing the need for additional control boards.